Subsecciones
El tránsito vehicular (también llamado tráfico vehicular, o simplemente tráfico) es el fenómeno causado por el flujo de vehículos en una vía, calle o autopista. Se presenta también con muchas similitudes en otros fenómenos como el flujo de partículas (líquidos, gases o sólidos) y el de peatones. En las grandes ciudades, el tráfico vehicular se encuentra presente en casi todos aquellos lugares de actividad diaria de la gente, y ocasiona numerosos fenómenos entre los que destacan especialmente los congestionamientos. [5]
La congestión vehicular o vial, se refiere tanto urbana como interurbanamente, a la condición de un flujo vehicular que se ve saturado debido al exceso de demanda de las vías, produciendo incrementos en los tiempos de viaje y dificultades para circular. Este fenómeno se produce comúnmente en las horas punta u horas pico, y resultan frustrantes para los automovilistas, ya que resultan en pérdidas de tiempo y consumo excesivo de combustible. [5]
La congestión del tráfico se produce cuando el volumen de tráfico o de la distribución normal del transporte genera una demanda de espacio mayor que el disponible en las carreteras. Hay una serie de circunstancias específicas que causan o agravan la congestión, la mayoría de ellos reducen la capacidad de una carretera en un punto determinado o durante un determinado periodo, o aumentar el número de vehículos necesarios para un determinado caudal de personas o mercancías.
En muchas ciudades altamente pobladas la congestión vehicular es recurrente, y se atribuye a la gran demanda del tráfico, la mayoría del resto se atribuye a incidentes de tránsito, obras viales y eventos climáticos. La velocidad y el flujo también pueden afectar la capacidad de la red, aunque la relación es compleja. Es difícil proceder en qué condiciones un atasco sucederá, pues puede ocurrir de repente. Se ha constatado que los incidentes (tales como accidentes o incluso un solo coche frenado en gran medida en un buen flujo anteriormente) pueden causar repercusiones (un fallo en cascada), que luego se difunde y crear un atasco de tráfico sostenido, cuando, de otro modo, el flujo normal puede haber continuado durante algún tiempo más.
- Flujo: es la cantidad de vehículos por unidad de tiempo.
- Velocidad: distancia recorrida por unidad de tiempo. La velocidad a la que circulan los vehículos es un dato importante para medir el nivel de congestión que existe. Para eso se define la velocidad media en atravesar la calle, que es la velocidad a la que se espera conducir en esa calle. Este valor varía dependiendo del tiempo. Si no pasan vehículos, entonces la velocidad de circulación va a aumentar hasta la velocidad máxima permitida. A medida que circulen vehículos por la calle, la velocidad que se puede esperar alcanzar para atravesar la calle, será similar a la velocidad que tenga el resto de vehículos. La velocidad de cada vehículo que pasa por la calle es obtenida por el sensor instalado en esa calle. Esta medida es una estimación, ya que supone que la velocidad que lleva un vehículo al pasar por el sensor se mantiene a lo largo de toda la calle.
- Tiempo: es el tiempo de viaje sobre un segmento del camino conocido. Esta medida es obtenida dividiendo el largo de la calle entre la velocidad
media en atravesar la calle.
- Ocupación: es el porcentaje de tiempo que en un segmento del camino es ocupado por vehículos.
- Densidad: es la cantidad de vehículos por unidad de distancia, en un lapso de tiempo.
- Tiempo entre el paso de un vehículo y otro.
- Distancia entre un vehículo y otro.
Un simulador es un sistema que permite reproducir el comportamiento de fenómenos. Los simuladores reproducen sensaciones que en realidad no están sucediendo, pero permiten observar cómo reaccionaría el sistema en caso de que si estuvieran ocurriendo. Un simulador pretende reproducir tanto las sensaciones físicas (velocidad, aceleración, percepción del entorno) como el comportamiento de los equipos de la máquina que se pretende simular. Para simular las sensaciones físicas se puede recurrir a complejos mecanismos hidráulicos comandados por potentes ordenadores que mediante modelos matemáticos consiguen reproducir sensaciones de velocidad y aceleración. Para reproducir el entorno exterior se emplean proyecciones de bases de datos de terreno. A este entorno se le conoce como ``Entorno Sintético''. [9]
Un modelo nos sirve para representar un fenómeno, en función de un propósito, existen diferentes modelos que describen el tráfico vehicular tomando algunas de sus características y nos dan aproximaciones matemáticas con cierto grado de apego a la realidad. Estos modelos son llevados a la simulación, elaborando un programa de cómputo que se comporte como el fenómeno físico, y así analizar y probar el modelo.
Debido a una gran variedad de modelos de tráfico vehicular existentes es necesario clasificarlos, existen varios criterios por los cuales se pueden clasificar. Los modelos son clasificados de acuerdo a los criterios de tabla 3.1. [10]
Tabla:
Clasificación de modelos
|
| Clasificación |
Descripción |
| Escala de las variables independientes |
- Continuo: Si las variables cambian de modo continuo en función del tiempo.
- Discreto: Si las variables varían en un conjunto contable de instantes de tiempo.
|
| Nivel de detalle |
- Microscópico
- Macroscópico
- Mesoscópico
|
| Representación de los procesos |
- Modelos determinista la representación no contiene variables aleatorias y todas sus las variables se definen mediante relaciones exactas.
- Los modelos estocásticos contienen al menos una variable no determinista.
|
| Funcionamiento |
El modelo puede describir la dinámica de los vehículos en un sólo carril con un sentido de flujo, con intersecciones en una red de avenidas, carreteras o autopistas. |
| Escala de aplicación |
Si es usado para una simulación o como solución analítica de un grupo de ecuaciones |
|
De acuerdo al nivel de detalle con que se describen las entidades en los modelos de tráfico vehicular pueden ser clasificados en base a la tabla 3.2. [10]
Tabla:
Clasificación de modelos por nivel de detalle
|
| Nombre |
Descripción |
|---|
| Modelo microscópico |
Describe el comportamiento del flujo de tráfico vehicular con gran detalle a través de describir el comportamiento de conductores y los automóviles vistos como entidades discretas individuales y atómicas que interactúan unas con otras
- El modelo de carro siguiente (Car-Following)
- Modelos de autómatas celulares
|
|---|
| Modelo macroscópico |
Estudia el comportamiento de los vehículos a gran escala, estos tipos de modelos describen el tráfico como un flujo de automóviles, sin tomar en cuantas las partes que lo componen que en este caso serían los automóviles de forma individual, sólo es visto en conjunto. Los tres parámetros macroscópicos principales que describen el flujo vehicular son:
- Velocidad vehículos
- Tasa Flujo vehicular
- Densidad de tráfico
|
|---|
| Modelo mesoscópicos |
Estudia los autos por grupos, se clasifican de acuerdo a sus velocidades y se obtienen tipos de autos que se pueden estudiar de forma individual, las actividades e interacciones se describe a un nivel de detalle bajo |
|---|
|
Los modelos macroscópicos se derivan de la analogía entre el flujo vehicular y un flujo continuo (fluido o gases) considera el tráfico vehicular como un flujo de vehículos y desarrolla algoritmos que relacionan el flujo, con la densidad y la velocidad.
Teoría del flujo vehicular
La teoría de flujo del tránsito consiste en el desarrollo de las relaciones matemáticas entre los elementos primarios del flujo vehicular tales como flujo, densidad y velocidad.
Mediante el análisis de flujo vehicular se puede entender las características y el comportamiento del tránsito y se describe la forma como circulan los vehículos en cualquier sistema vial. La teoría de flujo vehicular es aplicada en la simulación en la cual se utilizan complejos algoritmos matemáticos, para estudiar la interrelación que existe entre los elementos de un flujo vehicular y para estimar el efecto de los cambios en el flujo de tránsito. Las tres características fundamentales son representadas por las variables principales velocidad, densidad y flujo. [6]
Flujo: Se define el flujo como el número de vehículos que pasa por un punto o sección transversal dada, de un carril o una calzada, durante un periodo determinado, se expresa como:
17#17, T mayor a 1
- q: Número de vehículos que pasan por unidad de tiempo (vehículos por periodo).
- N: Número total de vehículos que pasan (vehículos).
- T: Periodo determinado (unidad de tiempo).
- Velocidad: La velocidad del tráfico es la distancia recorrida por un vehículo durante una unidad de tiempo regularmente se expresa en kilómetros por hora (km/h).
- Densidad (k): Es el número de vehículos que ocupa una longitud específica, de una vialidad en un momento dado.
Figura:
Densidad o Concentración
 18#18
18#18
|
Estas tres variables están relacionadas mediante la ecuación fundamental del flujo vehicular, su fórmula general es:
19#19
Velocidad media : Corresponde a la media aritmética de las velocidades observadas en algún punto designado de la vía se expresa como:
20#20
Dónde:
ui: Es la velocidad del i-ésimo vehículo.
n: Número de vehículos que transitan por la vía
Espaciamiento simple: Es la distancia entre dos vehículos consecutivos, expresado en metros.
Espaciamiento promedio: El espaciamiento promedio de todos los espaciamientos simples observados entre los vehículos que ocupan una vía, el espaciamiento promedio está dado por:
21#21
Dónde:
Si: Es el espaciamiento simple entre automóviles.
N: Es el número total de automóviles.
En resumen, los modelos macroscópicos se especifican en la tabla 3.3.
Tabla:
Modelos macroscópicos
|
| Nombre |
Descripción |
Fórmula |
|---|
| Modelo de Greenshields |
- Estudia la relación entre la velocidad y densidad, también entre la velocidad y el flujo.
- Por lo tanto a mayor velocidad menor densidad, y viceversa a menor velocidad mayor densidad.
|
22#22
|
|---|
| Modelo logarítmico de H. Greenbergs |
- Basada en teoría de fluidos.
- Combina y discretiza de las ecuaciones de movimiento y continuidad de fluidos.
|
23#23
|
|---|
| Modelo exponencial de R. T. Underwood |
- Representar más fielmente el comportamiento del flujo libre.
- Es más usado para modelar autopistas y avenidas o carreteras urbanas.
- Combina y discretiza de las ecuaciones de movimiento y continuidad de fluidos.
|
24#24
25#25
|
|---|
.
|
El enfoque microscópico considera los espaciamientos entre los vehículos individuales, así como sus velocidades.
En la tabla 3.4 se muestra la descripción de los modelos.
Tabla:
Modelos microscópicos
|
| Nombre |
Descripción |
|---|
| Modelo de Nagel-Schreckenberger |
- Estimar la respuesta del vehículo con respecto al comportamiento del vehículo que viaja adelante.
- Describen la aceleración de coches “seguidores” como funciones de la distancia entre el líder y el seguidor.
- El tamaño de las células es escogido de tal forma que un vehículo con velocidad igual a uno se puede mover a la próxima célula durante un paso de tiempo discreto.
|
|---|
| Modelo Car-Following (sigue al líder) |
- Basada en el flujo de fluidos.
- Combina y discretiza de las ecuaciones de movimiento y continuidad de fluidos, la velocidad relativa de los dos coches, y el tiempo de la reacción del conductor del coche seguidor.
- La ecuación básica de los modelos Car-Following para una línea de tráfico está dada en la ecuación Respuesta = Sensibilidad * estimulo.
- La respuesta dependerá de la sensibilidad del conductor a un estímulo dado. La respuesta se tomará como la aceleración o desaceleración de los vehículos siguientes.
|
|---|
|
Un autómata celular (de aquí en adelante nos referiremos a un autómata celular como AC) es un modelo matemático para un sistema dinámico que evoluciona en pasos discretos. Es adecuado para modelar sistemas naturales que puedan ser descritos como una colección masiva de objetos simples que interactúen localmente unos con otros. [11]
Las reglas son las que definen el comportamiento del autómata. Cada cierto tiempo determinado el AC hace un barrido por todas sus celdas, aplicando estas reglas para asignarles su nuevo estado.
Los autómatas celulares pueden ser usados para modelar numerosos sistemas físicos que se caractericen por un gran número de componentes homogéneos y que interactúen localmente entre sí, De hecho, cualquier sistema real al que se le pueda realizar una analogía de los conceptos de ``vecindad'', ``estados de los componentes'' y ``función de transición'' es candidato para ser modelado por un AC.
Las características de los autómatas celulares harán que dichos modelos sean discretos en tiempo, espacio o ambos (dependiendo de la variante de la definición de AC que se use).
Para el presente trabajo se requiere un modelo relativamente práctico el cual cumpla el hecho de representar un flujo de tránsito en detalle microscópico que alimente un modelo macroscópico.
El espacio y el tiempo son discretos por lo tanto el modelo es de tipo discreto.
El modelo elegido está basado en AC debido a su simplicidad para representar los eventos a diferencia de los demás modelos como el ``Carro siguiente'' y ``Teoría de colas'', siendo también más factible aplicar AC por su curva de aprendizaje corta para este equipo, como este trabajo no pretende detallar este generador de eventos se optó por lo más factible. [11]
El modelo de Nagel y Schreckenberg (Na-Sch) es un modelo de flujo de tránsito vehicular con un AC probabilístico. Por ende, es un modelo de espacio y tiempo discretos, donde cada célula del autómata equivale ya sea a un vehículo en movimiento con cierta velocidad v o a un espacio vacío de la avenida donde se encuentran los vehículos.
Creado en 1992 por los científicos Kai Nagel y Michael Schreckenberg, el modelo Na-Sch se ha convertido en la base de muchos otros modelos discretos de tráfico vehicular, debido a su sencillez que sin embargo es capaz de modelar adecuadamente los fenómenos de congestionamiento en autopistas. Esto sucede ya que las gráficas de densidad de tráfico vs. flujo de tráfico son muy similares a las observadas empíricamente en diversas avenidas reales.
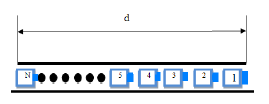
Antes de introducir las reglas del AC, se mencionan los parámetros relativos al modelo:
- Cada vehículo tiene asociada una posición x en la autopista. Al ser un AC un espacio discreto, cada célula equivale a un vehículo o a una célula vacía. Por convención, la posición es creciente, a partir de un índice 0.
- Cada vehículo tiene una velocidad v asociada, que es un valor entero, tal que:
26#26
- Vmax es la máxima velocidad que puede alcanzar cualquiera de los vehículos.
- P es la probabilidad de que un vehículo reduzca su velocidad aleatoriamente. Si P = 0, el modelo se conoce como Na-Sch Determinista, de lo contrario se conoce como Na-Sch No Determinista. Esta probabilidad puede verse como la causante de congestionamientos aleatorios en un flujo de tráfico normal, causado en la realidad por alguna causa arbitraria (como una distracción del conductor antes de comenzar a acelerar).
- B se conoce como la brecha, que es la distancia en células que separa a un vehículo de su predecesor (el vehículo inmediatamente adelante de él).
El modelo Na-Sch consta de 4 reglas para modelar el comportamiento de un vehículo cualquiera en la autopista. Estas reglas se refieren a la aceleración, frenado y movimiento de los vehículos:
- Regla 1: Aceleración.
27#27. Es decir, si aún no se llega a la velocidad máxima, acelerar en una unidad.
- Regla 2: Frenado por la interacción con otros vehículos. 28#28. Es decir, la velocidad será igual al mínimo entre la velocidad calculada en la regla 1 y la brecha con el predecesor. Esto evitará que el vehículo golpee al predecesor (el modelo Na-Sch original no modela accidentes vehiculares).
- Regla 3: Frenado aleatorio. Con probabilidad p,
29#29. Es decir, con probabilidad p, si el vehículo aún no está completamente detenido, su velocidad (la calculada en la regla 2) se reduce en una unidad. Si 30#30 (modelo Na-Sch determinista), ésta regla nunca se lleva a cabo.
- Regla 4: Movimiento. 31#31. Es decir, se actualiza la posición del vehículo con su nueva velocidad v (la calculada en la regla 3).
De acuerdo a los autores del modelo, un AC que modele tráfico vehicular en una autopista con las reglas anteriores servirá para modelar en la realidad una autopista con las siguientes características:
- Células de 7.5m de longitud (que equivalen al tamaño promedio de los vehículos más su distancia con sus predecesores (las brechas) en un congestionamiento).
- Unidades de tiempo de 1s, para 32#32.
- Como los vehículos tienen velocidades que son múltiplos de 1 celda/s, esto corresponde con 27km/h. Por lo tanto, sí 32#32, esto corresponde con 135km/h.
Un sistema operativo móvil o SO móvil es un sistema operativo que controla un dispositivo móvil al igual que las computadoras utilizan Mac, Linux o Windows entre otros. Sin embargo, los sistemas operativos móviles son bastantes más simples y están más orientados a la conectividad inalámbrica, los formatos multimedia para móviles y las diferentes maneras de introducir información en ellos.
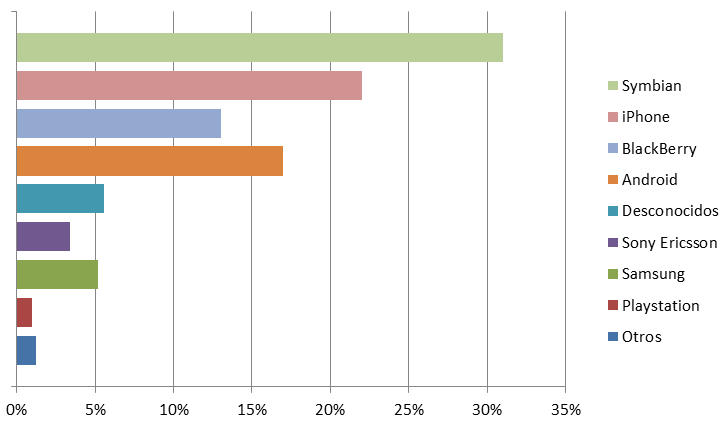
En primera instancia se localizaron los sistemas operativos más destacados en la actualidad por el impacto en el mercado en México y del mundo entero, los cuales se muestran en la figura 3.2 y la figura 3.3.3.1
Figura 3.2:
Comparativa en el Mercado mundial Enero-Agosto 2011
 .
|
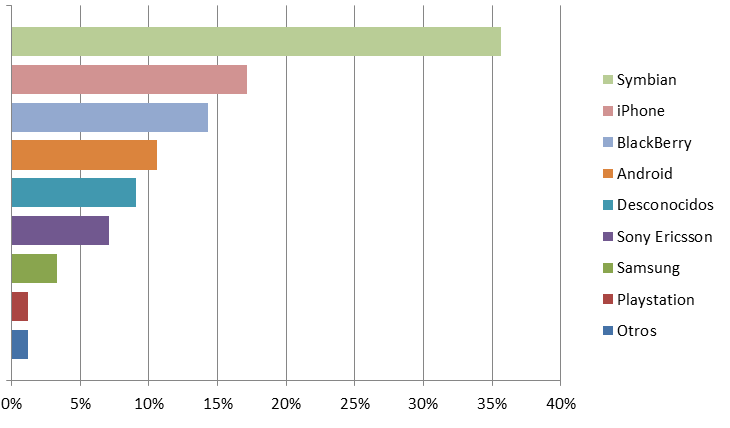
Figura 3.3:
Comparativa en el Mercado Mexicano Enero-Agosto 2011
 .
|
Como se observa en los gráficos (Figura 3.2 y la Figura 3.3) se destacan cuatro sistemas operativos móviles principalmente, los cuales son:
- Symbian
- IPhone
- Android
- Blackberry
A continuación se define las especificaciones de estos sistemas operativos móviles para la selección de la plataforma en la tabla 3.5, para este proyecto es parte fundamental el uso del GPS.
Tabla 3.5:
Comparativa de plataformas
|
| Plataforma |
Núcleo |
Licencia |
Soporte GPS |
Soporte Web |
Soporte |
| Symbian |
Microkernel |
Apache 2.0 y GNU GPL 2 |
Si |
Si |
Alto |
| Android |
Linux |
Apache 2.0 y GNU GPL 2 |
Si |
Si |
Muy Alto |
| IPhone |
Darwin BSD |
APSL y Apple EULA |
Si |
Si |
Alto |
| BlackBerry |
Microkernel |
Propietaria |
No |
Si |
Bajo |
|
El Soporte de la tecnología del GPS y Soporte Web, son esenciales para el desarrollo y como se observa en la tabla 3.5 el sistema operativo móvil Android cuenta con un muy alto soporte debido a la gran comunidad que forma parte del desarrollo y por ser de código abierto, Symbian está en fase de desarrollo aun mientras que con IPhone a pesar que el desarrollo es grande no es código abierto, respecto a Blackberry como se observa el soporte es muy bajo.
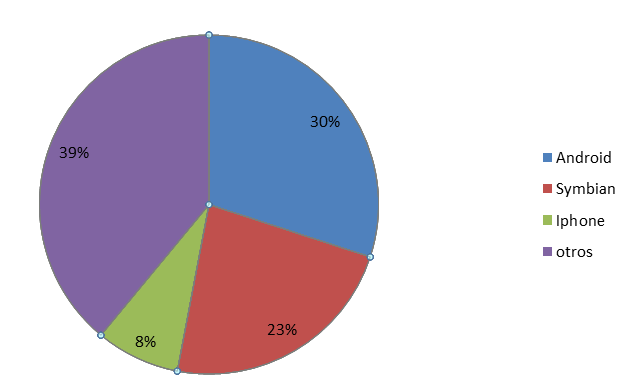
Android está creciendo de forma considerable, aunque el número de aplicaciones no se acerca al número de aplicaciones para IPhone, cada vez más desarrolladores trabajan sobre Android, como se observa en la figura 3.4. Por lo que se optó por seleccionar esta plataforma, Android.
Figura:
Comparación del desarrollo de aplicaciones en las diferentes plataformas 2011
 .
|
Respecto al lenguaje de programación a usar en la tabla 3.6 se observa una breve descripción.
Tabla 3.6:
Comparativa de lenguajes
|
| Lenguaje |
Desarrollo |
Soporte |
Problemas detectados |
Curva de aprendizaje |
| Java |
Completo |
Muy Alto |
- |
Corta |
| C++ |
Beta |
Bajo |
Bugs con GPS |
Corta |
|
El desarrollo en C++ solo es posible mediante un puerto siendo el más común Necessitas además el soporte es bajo y se detectó que el manejo del GPS solo es posible mediante Java. En cuanto a Java el soporte es muy alto contando con foros de desarrollo y con exitosas pruebas en el manejo del GPS. Se realizaron pruebas con un dispositivo Motorola defy. Por lo tanto el lenguaje de programación a utilizar es Java.
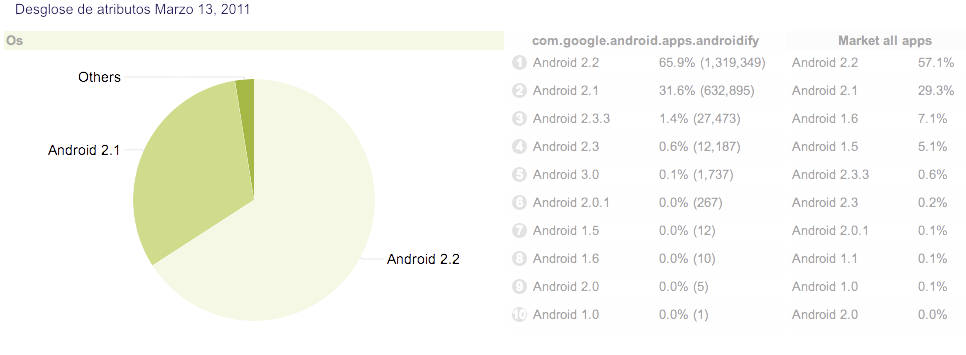
Respecto a las versiones del sistema operativo Android, en la figura 3.5 observamos las versiones más estables 2.1 y 2.2, que en la versión 2.2 hay mayor número de aplicaciones que en la 2.1.3.2.
Figura:
Estadísticas en desarrollo en cuanto a versiones de Android y dispositivos
 .
|
Con dicha información se determinó que se desarrollará sobre una versión de Android 2.2. debido además de ser estable es en donde se desarrollan más aplicaciones.
Existen diversos dispositivos que cuentan con estas características concluidas donde destacan los más importantes en la tabla 3.7.
Tabla 3.7:
Comparativa de dispositivos
|
| Marca |
Modelo |
Precio Aprox.3.3 |
Características |
| Sony Ericsson |
Xperia PLAY |
$ 9,000 |
MicroSD hasta 32GB, 500MB memoria interna, 380 MB RAM, Camara 5MP, GPS, Procesador Qualcomm MSM8255 Snapdragon 1 GHz, Adreno 205 GPU |
| Motorola |
Atrix |
$ 11,000 |
MicroSD hasta 32GB, 16GB memoria interna, 1GB RAM, Camara 5MP, Camara GPS, Procesador NVIDIA Tegra 2 AP20H Dual Core 1GHz |
| Motorola |
Defy |
$ 6,000 |
MicroSD, hasta 32GB, 2GB memoria interna, 512 MB RAM, Camara 5MP, GPS |
| LG |
Optimus One P500 |
$ 4,500 |
MicroSD hasta 32GB, 140MB memoria interna, Camara 3.15MP, GPS |
| LG |
Optimus Black P970 |
$ 9,000 |
MicroSD hasta 32GB, 2GB memoria interna, 512 MB RAM, Camara 5MP, GPS, Procesador TI OMAP 3630 1GHz |
| Samsung |
Galaxy Ace |
$ 4,500 |
MicroSD hasta 32GB, 158MB memoria interna, Camara 5MP, GPS, Procesador Qualcomm QCT MSM7227-1 Turbo 800 MHz |
| Samsung |
Galaxy SII |
$ 11,000 |
MicroSD hasta 32GB, 16GB memoria interna, 512 MB RAM, 2GB ROM, Camara 5MP, GPS, Procesador ARM Cortex A8 Hummingbird 1GHz, GPU PowerVR SGX540 |
|
Se realizaron pruebas en algunos móviles de marca Samsung, Motorola y LG, pero en el dispositivo Samsung Galaxy cuenta con problemas en cuanto a la ubicación del GPS, con el resto de la marcas no hubo problema alguno, y observando en foros de desarrolladores en Android recomiendan la marca Motorola por su estabilidad, por lo tanto el dispositivo a usar es un Motorola Atrix.
En resumen se concluye lo siguiente:
- Plataforma a usar: Android.
- Lenguaje a usar: Java.
- Versión de la plataforma: 2.2.
- Dispositivo móvil: Motorola Atrix.
IPN - ESCOM